O que é a comunicação em série? A explicação académica é um método de envio contínuo de um bit de dados através do bus num determinado momento. Tal como um arqueiro que dispara o seu arco e flecha frequentemente, whoosh, whoosh, whoosh...
O que é o protocolo de comunicação em série? Em poucas palavras, é o método de transmissão do protocolo utilizado na comunicação em série.
Quantos tipos de protocolos de comunicação em série existem? Os protocolos de comunicação em série incluem protocolos inter-sistemas e protocolos internos do sistema.
Protocolo Intersistema: Um protocolo intersistemas utilizado para comunicar entre dois dispositivos diferentes. Tal como a comunicação entre o computador e o kit de microcontroladores. A comunicação é efectuada através do sistema de barramento interno. Os protocolos mais comuns incluem o protocolo UART, o protocolo USART e o protocolo USB.
Protocolo do sistema interno: O protocolo interno do sistema é utilizado para comunicar entre dois dispositivos na placa de circuitos. Ao utilizar estes protocolos internos do sistema, alargaremos os periféricos do microcontrolador sem utilizar os protocolos internos do sistema. A utilização de protocolos internos aumenta a complexidade do circuito e o consumo de energia. Utilizando protocolos in-system, a complexidade do circuito e o consumo de energia são reduzidos, os custos são reduzidos e o acesso aos dados é muito seguro. Os protocolos mais comuns incluem o protocolo I2C, o protocolo SPI e o protocolo CAN.
Protocolo UART
UART significa Universal Asynchronous Transmitter and Receiver (transmissor e recetor assíncrono universal). O protocolo UART é uma comunicação em série com dois protocolos com fios. As linhas de sinal do cabo de dados são designadas por Rx e Tx. A comunicação em série é normalmente utilizada para enviar e receber sinais. É transmitida e comunicada com a porta de série para receber dados sem impulsos. A UART recebe os bytes de dados e envia os bits individuais sequencialmente.
O protocolo USAT é normalmente utilizado como um periférico de MCU em sistemas incorporados; de um modo geral, o nível TTL é derivado diretamente do pino do chip; e o nível RS232 pode ser ligado ao chip de conversão no meio: Normas para comunicação em série

A UART é um protocolo half-duplex. Half-duplex significa ter a capacidade de transmitir e receber dados, mas não simultaneamente. A maioria dos controladores tem uma UART de hardware na placa. Ela usa uma linha de dados para enviar e receber dados. Tem um bit de arranque, dados de 8 bits e um bit de paragem, indicando que os dados de 8 bits são transmitidos de alto para baixo. Por exemplo: correio eletrónico, mensagens de texto, walkie-talkies, servidor de série de equipamento de transmissão IoT industrial.

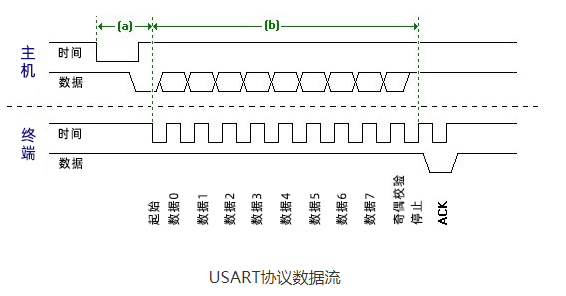
Protocolo USART
USART significa Universal Synchronous and Asynchronous Transmitter and Receiver (transmissor e recetor universal síncrono e assíncrono). Trata-se de uma comunicação em série com protocolo de dois fios. As linhas de sinal do cabo de dados são designadas por Rx e TX. Este protocolo é utilizado para enviar e receber dados byte a byte, juntamente com impulsos de relógio. Este é um protocolo full-duplex, o que significa que os dados são enviados e recebidos simultaneamente a diferentes velocidades da placa. Diferentes dispositivos comunicam com o microcontrolador através deste protocolo. Por exemplo, telecomunicações.
Protocolo USB
USB significa Universal Serial Bus (barramento de série universal). Mais uma vez, é um protocolo de dois fios para comunicação em série. Os fios de sinal do cabo de dados estão marcados com D e D-. Este protocolo é utilizado para comunicar com os periféricos do sistema. O protocolo USB é utilizado para enviar e receber dados em série para o anfitrião e dispositivos periféricos. A comunicação USB requer software de controlador baseado nas capacidades do sistema. Os dispositivos USB podem transmitir dados no anfitrião sem qualquer barramento solicitado. Atualmente, a maioria dos dispositivos utiliza esta tecnologia para comunicar com o protocolo USB. Utilize o USB para comunicar com o controlador ARM como um computador. O USB transfere dados em diferentes modos. O primeiro é um modo lento de 10 kbps a 100 kbps; o segundo é um modo de velocidade total de 500 kbps a 10 mbps e um modo de alta velocidade de 25 mbps a 400 mbps. O comprimento máximo do cabo USB é de 4 metros.
Por exemplo: rato, teclado, hub, switch, pen drive.

Protocolo I2C
I2C significa Inter Integrated Circuit (circuito integrado). O I2C requer apenas dois fios para ligar todos os periféricos ao microcontrolador. O I2C requer apenas dois fios, SDA (linha de dados em série) e SCL (linha de relógio em série), para transferir informações entre dispositivos. É o protocolo de comunicação mestre dos escravos. Cada escravo tem um endereço único. O dispositivo mestre envia o endereço e os sinalizadores de leitura/escrita do dispositivo escravo alvo. Este endereço corresponde a qualquer dispositivo slave que esteja ligado, os restantes dispositivos slave estão em modo desativado. Uma vez que os endereços coincidam, a comunicação ocorre entre o mestre e esse escravo, e os dados são enviados e recebidos. O transmissor envia 8 bits de dados e o recetor responde com 1 bit de confirmação. Após a conclusão da comunicação, a estação mestre emite uma condição de paragem.
O bus I2C foi desenvolvido pela Philips Semiconductors. O seu objetivo original era proporcionar uma forma fácil de ligar a CPU a chips periféricos. Os periféricos em sistemas incorporados são frequentemente ligados ao microcontrolador como dispositivos mapeados na memória. O I2C requer apenas dois fios para ligar todos os periféricos ao microcontrolador. Estas linhas activas, chamadas SDA e SCL, são bidireccionais. A linha SDA é a linha de dados em série, enquanto a linha SCA é a linha de relógio em série.

Resistência de pull-up I2C:
Porquê utilizar resistências pull-up nas linhas I2C SCL e SDA.
As linhas SDA e SCL são ambas controladoras de dreno aberto.
Pode conduzir a saída para baixo e para cima.
Para que a linha fique alta, é necessário fornecer uma resistência pull-up
Protocolo SPI
SPI significa Serial Peripheral Interface (Interface Periférica Serial). É um dos protocolos de comunicação em série desenvolvidos pela Motorola. Por vezes, o protocolo SPI é também designado por protocolo de 4 fios. Requer quatro fios MOSI, MISO, SS e SCLK. O protocolo SPI é utilizado para comunicar dispositivos mestre e escravos. O anfitrião começa por configurar o relógio com a frequência. Em seguida, o anfitrião selecciona um dispositivo escravo específico para comunicar através de um botão de pressão. Selecionar esse dispositivo específico e iniciar a comunicação entre o mestre e esse escravo específico. O master selecciona apenas um slave de cada vez. É um protocolo de comunicação full-duplex. No caso de transferências de bits, não está limitado a palavras de 8 bits.

Protocolo CAN
CAN significa Controller Area Network (rede de controlo). Trata-se de um protocolo de comunicação em série. Requer duas linhas CAN high (H) e CAN low (H-). Foi desenvolvido pela Robert Bosh Corporation em 1985 para utilização em redes automóveis. Baseia-se num protocolo de transporte orientado para as mensagens.
A década de 1970 foi a época em que os fabricantes de automóveis começaram a introduzir novas funcionalidades, como travões anti-bloqueio, ar condicionado, controlo das mudanças, fechaduras das portas com comando centralizado, etc. Estas características implicam cablagens adicionais e designs complexos, aumentando os custos e os riscos. Para ultrapassar estes problemas, a Robert Bosch introduziu o protocolo CAN na década de 1980. Este protocolo de comunicação em série foi posteriormente normalizado como ISO11898 em 1993. Foi o protocolo CAN que transformou completamente a comunicação entre sensores avançados.
O protocolo CAN é normalmente utilizado em redes electrónicas em automóveis, aviões e sistemas médicos. Os produtos comuns incluem o equipamento CAN para Ethernet USR-CANET200

Palavras-chave: 4gdtu